Mind Render +こーじ
第1回プログラミングコンテスト
結 果 発 表
「Mind Render +こーじ第1回プログラミングコンテスト」へご応募いただいた皆さま、どうもありがとうございました。大変真面目に取り組んでいただきましたことに主催者一同深く御礼申し上げます。
慎重に審査した結果、以下の方の作品を入賞作品と決定しましたのでここに発表させて頂きます。
入 賞
おつんご さん
たんじぇんと さん
ぽりそばごん さん
こめじるし さん
はとぽっぽ さん
入賞された皆さまには、Amazonギフト券(3,000円)または【こーじ】Tシャツをお贈りいたします。
コンテストの課題はこちらの動画からご覧いただけます。(YouTube チャンネル「こーじ(物理エンジン)」にリンクします。)
審 査 コ メ ン ト
“こーじ”さんの審査コメントを紹介いたします。
入賞したプログラム作品はMind Renderでご覧いただけます。(共有キー:95624378)
総評
たくさんのご応募本当にありがとうございました。
面白いアイデアがたくさんあり、僕では全く思いつかない掃除方法も多くとても楽しませていただきました。
今回のコンテストでは、掃除ロボットがゲットした得点だけでなくプログラムの工夫点やロボットの面白い動き方をより重視して評価しています。
そして、僕だけでなくMind Render開発チームのそれぞれが皆さんの作品を評価し総合的に良かったと思う作品を表彰致しました。
惜しくも入賞を逃した方々の作品もそれぞれに工夫が凝らされておりました。改めて、皆様の努力とアイデアに敬意を表したいと思います。
こーじ(物理エンジン)
おつんご さん
最高です。裏コマンドでの動作にも凝っていて爆笑させていただきました。BGMやエフェクト、開始直後から様々な見た目も工夫されており1つのゲームをプレイしている感覚になれました。
ロボットの動き(プログラム)についても、最初の盤面の状態によって作戦コードを変更し動き方を変える工夫がとても素晴らしく、これにより毎回全く同じ動きにならず高評価です。
目標地点を表示しそこに向かっていることを視覚化したことも、掃除ロボが今どういう動きをしているのかが分かりやすく楽しめました。
ロボットを移動させる際、汚れポイントは考慮せず、向かう場所を座標で指定してしまっており、ある程度ルートが決まってしまっている点が惜しかったです。
ご参加本当にありがとうございました。
注:
この作品には裏コマンドが設定されています。通常プレイでは「A」ボタンを押すとロボが動きます。
裏コマンドを起動するには、「A」ボタンを押した後、「C C D D A B A B」の順にボタンを押します。(ゆっくり目に押してください。)
たんじぇんと さん
効率的で無駄の無い動きで高得点を取っていて凄いです。
単純に移動経路を座標指定しているのではなくしっかりと汚れの位置を自動的に考慮してから移動を開始する工夫点がとても好きです。動くための判断が内部に実装されることで仮に今回とは全く違う部屋にこのロボットを置いたとしてもしっかり掃除機として動くという強みになりますね。
汚れ位置の傾向を特定、それに対する解決策の工夫、それらをプログラム内のコメントへ記入など高く評価出来ます。
プログラム内のコメントでも触れておりました通りここまで複雑にしなくても似た動きが実現できる点、またどうしても動き方が単調で毎回似た感じになりがちなので動きの面白さ的な部分では惜しかったなという印象です。
ご参加本当にありがとうございました。
ぽりそばごん さん
プログラム内に様々な工夫をいれており高く評価します。特に充電スポットに向かう際に近くに汚れがあれば寄り道する工夫が他にはなく、毎回どんな動きで掃除するのかが違ってきて面白く感じます。
マクロブロック(関数)を上手く使いプログラムも読みやすく素晴らしいと思いました。
残りの充電%がまだたくさん残っている状態で充電スポットに到着することがあったので得点効率的な部分は惜しかったなという印象です。
ご参加本当にありがとうございました。
こめじるし さん
プログラムの工夫がなされていて高く評価します。乱数を使用し動きにランダム性を持たせている点、部屋を左右に分けどちらにいる時間が長いのか秒数で測り乱数の範囲を狭める工夫など個人的にとても好きです。
このような機能は、仮に今回とは全く違う部屋にこの掃除機を置いたとしても機能してくれそうですね。
残り充電が40%を切ると自動的に充電スポットに向かうようですが、現在位置によっては40%が最適では無い場合や、充電スポットに向かう時のルートを直線ではなく経由地を考えるなどすると更なる得点増加に繋がったかもしれないという点が惜しかったです。
ご参加本当にありがとうございました。
はとぽっぽ さん
プログラムに様々な工夫が見られ素晴らしいです。特に、残りの充電と自分の現在位置を考慮していつ充電しに行くのが良いのか考えて実装している点が個人的にとても好きです。
壁にぶつかった時の挙動も自分の位置によって変わり、また汚れポイントを考慮して掃除をしてますが、単純に汚れポイントを順番に掃除するわけでもなく、毎回同じ動きをしない点も高評価です。
何度も試してみると、時々状況によっては充電しに行こうにも壁を回避できず壁に向かって進み続けてしまう点が惜しかったです。
ご参加本当にありがとうございました。
作 品 紹 介
入賞したプログラム作品はMind Renderでご覧いただけます。
共有キー:95624378
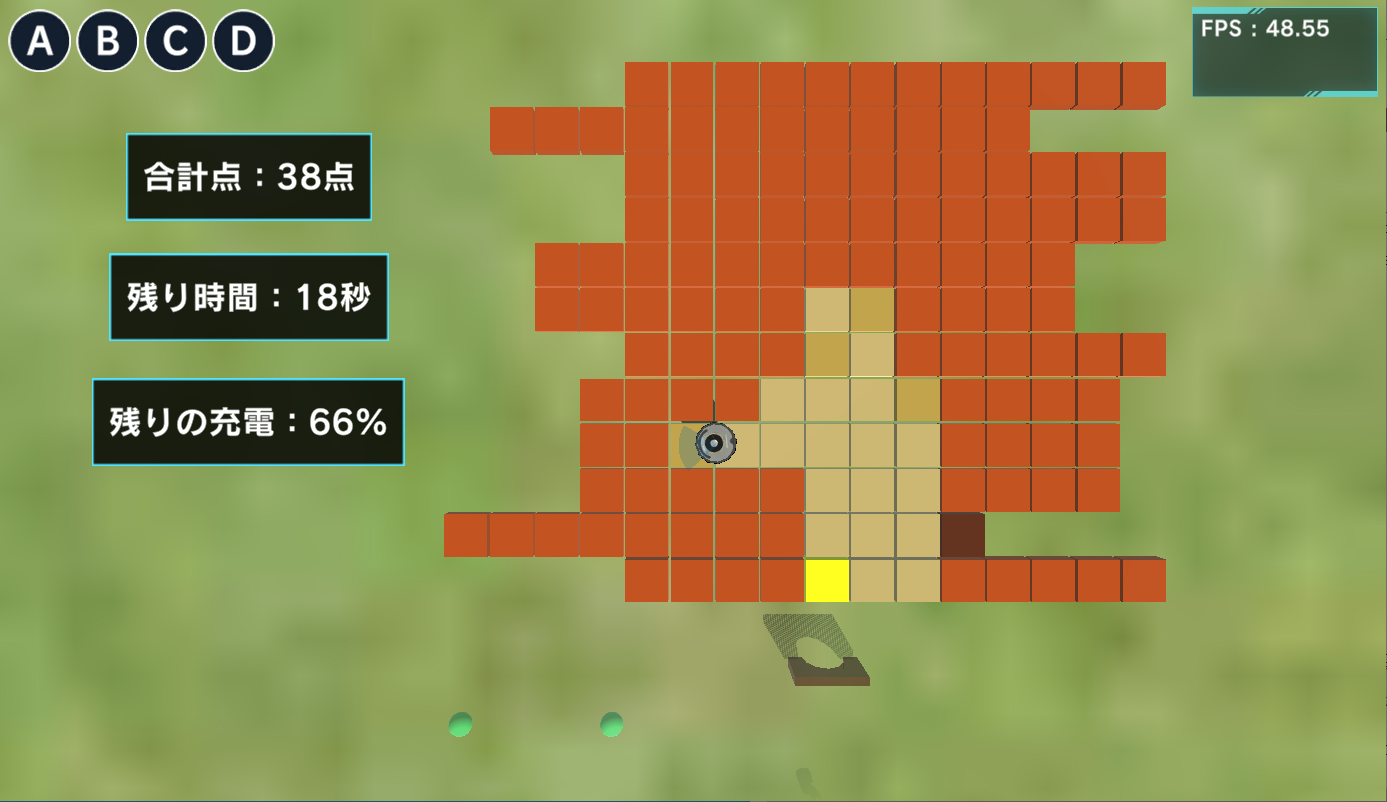
プログラムの見方
1. Mind Renderをインストールし、起動する
2. 初めてご利用になる場合は、トップページの「ロッカー」からロッカー登録をする
(メールアドレスが必要です)
3. ロッカーにログインする
4. 「共有ロッカー」タブを選択し、共有キーを入力する
共有キー:95624378
5. プログラムが5つ表示されるので、見たいプログラムを読み込む
(自分のロッカーに保存して、編集することもできます)
6. 右上の実行ボタンを押し、続いて左上の「A」ボタンを押す
注:おつんごさんのプログラムの裏コマンドを発動するには、「A」ボタンを押した後、「C C D D A B A B」の順にボタンを押してください。(ゆっくり目に押してください。)
次 回 予 告
今後も”こーじ”さんと共に、Mind Renderプログラミングコンテストの実施を予定しております。開催が決まり次第、YouTubeチャンネル「こーじ(物理エンジン)」や本サイト等で告知いたします。ぜひふるってご参加ください。